PLC问题-咨询行家解决

PLC培训、工业机器人培训、工业自动化培训
简介: 机器人系统集成工程师、机器人应用工程师、KUKA认证工程师、1+X考核师8年机器人系统集成经验,熟悉KUKA机器人底层算法,具备针对客户需求,独立开发工艺包的能力。精通西门子200、300、1200;台达;三菱等PLC。熟悉机器人集成项目前、中、后期的项目规划、实施等相关的运营流程及管理方式。

PLC培训、工业自动化培训
简介: 2016/9创立了成都倍菲信机器人有限公司至今2012/5-2016/4电气工程师|电气部 成都思尔特机器人科技有限公司 [3年11个月] 机械/设备/重工|150-500人|国企工作描述:主要负责项目进展的协调工作,项目电气评审、图纸设计、图纸下发、下发外购件清单、场内调试、现场调试、员工培训、图纸归档场外验收及售后服务。2011/9-2012/6技术员|技术中心车身所 中国重汽集团成都商用车有些公司 [9个月] 汽车及零配件|500-1000人|上市公司工作描述:在职期间主要负责商用车货箱举升液压系统设计,副梁及货箱设计工作,同时还负责对试制样件交期跟进及与生产部门与其他部门的联络工作。项目经验2015/11-2016/4五菱M50N前副车架机器人焊接生产线项目描述:MOTOMAN-MA2010、IR6700-200/2.6、松下350焊接电源、小原焊钳、SEW电机、PLC Q02UCPU、HMI GS2107-WTBD、变频器FR-E740-5.5K-CHT(硬件环境)GX Works2、GT Designer3、EPLAN、 RobotStudio(软件环境)该项目由4台安川机器人组成的2个弧焊工位、1台ABB6700机器人组成的1个点焊工位和1个手工补焊工位组成,分别对前副车架进行拼焊,总成焊接和补焊,实现前副车架的自动焊接。责任描述:项目的方案评审、图纸设计、元件选型和场内调试培训工作并协调各部门工作。2015/9-2015/10柳汽地板线整改项目描述:R-2000iB,小原气动焊钳(硬件环境)项目为霸龙地板线新增5个机器人工位,将原来的手动焊接工位拆掉,增加6个点焊机器人和焊钳和控制器,实现地板的自动焊接。责任描述:机器人点焊系统的配置,profibus-dp的通信配置,机器人程序的规划,试教,节拍优化等。2015/9-2015/12江铃N330门盖涂胶滚边线项目描述:AB 1756-L72S、2711P-T10C4D8、库卡KRC4、SCA涂胶机、抓手、高思博转台、SEW电机(硬件环境)FactoryTalk View 、Studio 5000、RSNetWorx for DeviceNet、RSLinx Classic、WorkVisual 3.17、OrangeEdit、GlueTech_42、eplan(软件环境)该项目由转台实现门盖内外板的物料输送,涂胶机器人实现折边胶及减震胶的涂料,搬运机器人抓取至胎具压紧,再由滚边机器人分3次不同角度的翻边达到好的效果,由搬运机器人从胎具搬运至物料滑胎,实现自动涂胶滚边功能。责任描述:项目的方案评审、图纸设计、元件选型、场内调试、现场调试,并协调各部门工作。2014/10-2015/1江铃福特V362新全顺门盖涂胶线项目描述:库卡KRC4、SCA涂胶机、抓手(硬件环境)WorkVisual 2.4、OrangeEdit、GlueTech_41、EPLAN(软件环境)该项目为前面U375项目的类似产线,参考前一项目经验,该线性能有所提升,生产种类升级为十种,布局也更简洁美观,生产节拍得到提升。责任描述:库卡机器人系统总线、控制总线及外部总线的配置,涂胶包的配置,机器人与抓手、涂胶机Devicenet总线的组网,机器人程序的规划,程序的试教,与PLC控制系统完成整线的自动运行及生产。2014/5-2015/9江铃福特U375撼路者门盖涂胶线项目描述:库卡KRC4、SCA涂胶机、抓手(硬件环境)WorkVisual 、OrangeEdit、GlueTech_41、EPLAN(软件环境)项目为车身4门2盖内外板涂胶线,通过两个机器人分别给内板涂减震胶及外板涂折边胶,再将内外板在合拼台扣合在一起,由行走机器人抓取放入包边机完成包边,再由搬运机器人从压机中取放入料框中。通过HMI输入不同的车门种类,实现合拼台及抓手的自动切换。责任描述:库卡机器人系统总线、控制总线及外部总线的配置,涂胶包的配置,机器人与抓手、涂胶机Devicenet总线的组网,机器人程序的规划,程序的试教,与PLC控制系统完成整线的自动运行及生产。2014/3-2014/4汽车左前门内板点焊焊工作站项目描述:ABB6640机器人、小原C型焊钳、小原X型焊钳、补焊抓手、西门子S300(硬件环境)RobotStudio(软件环境)工作站为学校教学用点焊机器人工作站,通过不同的焊钳对内板的点焊,再通过抓手,将内板抓放至补焊工作台,对不能再转台点焊的内板进行补焊,当打点到一定数量回到原点后,自动修模,修模量达到修模极限将手工更换电极帽。责任描述:点焊机器人系统配置,双伺服马达的配置、机器人程序编写及规划,机器人与S7-300通过Profibus的网络通讯、机器人与小原控制器I/O的通讯。2013/12-2013/12翼子板点焊工作站项目描述:ABB6640机器人、亨龙焊钳及控制器、三菱FX2N(硬件环境)Works2、RobotStudio(软件环境)工作站为双工位点焊工作站,当打点到一定数量回到原点后,自动修模,修模量达到修模极限将手工更换电极帽。责任描述:点焊机器人系统配置,伺服马达的配置、机器人程序编写及规划及与点焊控制器的通讯。2013/2-2013/5四川现代主肢管机器人焊接系统项目描述:PLC FX3U、ABB IRC5、松下500焊接电源、TBI清枪站(硬件环境)Works2、RobotStudio、EasyBuilder8000(软件环境)工作站为3个ABB1410机器人带三个松下伺服变位机,当焊接完成一个角度的焊道是,变位机转到下一个焊接工位,中途机器人自动完成清枪。责任描述:PLC的程序设计,威纶触摸屏的组态,机器人程序试教,焊接工艺的确定及评定试板件的试焊。2012/11-2012/12五菱组合通管、注油管机器人焊接系统项目描述:PLC FX3U、ABB IRC5、松下350焊接电源(硬件环境)Works2、RobotStudio、NB-Designer(软件环境)工作站为带松下伺服电机双工位焊接工作站、PLC与机器人通过I/O板点对点通信,机器人通过模拟量来控制焊接电源的电流及电压。责任描述:场外调试、机器人试教,焊接工艺的优化、员工培训、设备使用说明书的编写及验收。2012/10-2012/11中联重科变幅活塞杆耳环机器人焊接系统项目描述:PLC FX3U、ABB IRC5、Fronius TPS5000焊接电源(硬件环境)Works2、RobotStudio、NB-Designer(软件环境)工作站为带外部轴双工位焊接工作站,通过PLC调用机器人程序号来实现对不同尺寸活塞杆的焊接,PLC与机器人通过I/O板点对点通信,机器人与焊机为Devicenet现场总线通信。责任描述:PLC的程序设计,欧姆龙触摸屏的组态,机器人程序试教,及焊接工艺的确定。





300课时 滚动开班 小班
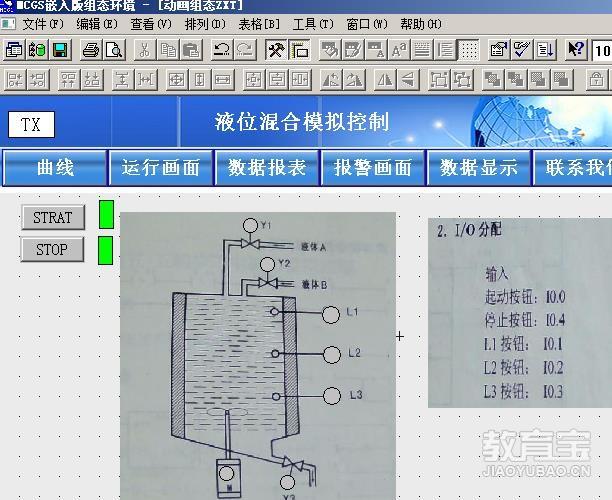
课程简介:没有人学几天就能成为工程师,也没有人会日积月累仍-无所获。技术学习同样如此,在plc的学习上也是这样, -般来说PLC控制系统技术学习过程,每个阶段的知识学习都需要经过一定的应用积累。 也可以说PLC的学习过程就是在日常应用中的点滴积累起来的。电子科大PLC培训班,0基础招生学电工技术,学PLC技术,我们应该怎么学习,学电工应该注意些什么?一、逻辑阶段逻辑阶段就是可以实现继电系统中的一般逻辑性设计,既然是继电系统所以电力拖动知识就是该阶段的基础。总结来说学习继电系统关键在于-个"抢" ,继电系统之所以能实现逻辑控制就在这个上。继电系统中主要就有那么三个东西: A常开、B常闭、C线圈。这就对应了PLC中的基本元素了,只不过阅读的方法有所不同。继电系统中的所有硬元素是同-时态开始竞争的。而PLC中的所有软元素是通过PLC的CPU来进行扫描计算处理最后计算出该时态的结果,这便是PLC的扫描循环工作方式。二.顺控阶段顺序控制在I业中的应用相当广泛,例如一般性的自动机床它就是一个顺序控制过程。 PLC设计中实现顺控的有两种方法:一PLC中的顺控指令如三菱STL;二起保停控制方式。不管哪种控制方式在设计伊始我们要完成的是"流程",它是系统构成的脉络主要有三个方面: - "步"二 "活动步"三"转换条件"。三、该阶段本质上是区别于继电控制系统的,是继电控制系统无法实现的,也是提高PLC控制系统功能的根本。其之所以称之为汇编阶段,是因为它和单片机的汇编语言编程有一定的相似度 ,例如单片机中的传送指令MOV ,在PLC的高级指令中也是一样的功能。 这一阶段难度比较大,一要学习计算机基础 ;第二要充分了解PLC的内部功能和资源;第三需熟悉所有的高级指令的功能。如果不了解计算机基础的话在学习高级指令和PLC内部资源的时候可能无法理解,在设计思路上和继电系统也有很大区别,例如: I0.0和IB0第-个是"位"也就是逻辑设计的"点" ,第二个是"字节"在逻辑设计中没有涉及到。四.特殊阶段特殊阶段就是对特殊功能的系统而言的,例如运动控制, PID温度控制,网络连接等等。不同的PLC能实现的功能不样,有些功能PLC内是集成的而有些是需要外加扩展的,那么就要根据不同的控制对象去选用了。掌握好该阶段是可以大大提高PLC的程序,但是还需掌握PLC以外的其他自动化知识,如伺服、变频器等等。五、随着自动化技术的发展由PLC做下位机的应用也十分多见。该阶段组要学习是不同PLC的通信协议和一些通讯指令,如PLC通过编程口控制变频器如西门子的USS协议与变频器进行信息的交换。要学PLC技术,首先扎实的基础很重要,也为你在后期学好PLC技术和以后的工作中做好铺垫!学习PLC技术欢迎到电子科大PLC培训班。
获取价格机器视觉培训需要的技术知识包括数字图像处理、计算机视觉、机器学习和深度学习、光学和成像技术、编程和软件开发技术、数学和统计学知识,以及相关行业和应用知识。这些知识可以帮助开发人员更好地理解和实现机器视觉技术,并将其应用于实际场景中。同时,随着技术的不断进步和应用领域的拓展,建议持续学习和更新知识,以保持竞争力。
 琚辑
琚辑机器视觉培训需要哪些证书,主要取决于具体的应用领域和行业要求。以下是一些可能相关的证书: 计算机视觉证书:针对计算机视觉领域,包括机器视觉工程师、计算机视觉算法工程师等资格证书。这些证书通常由行业协会或企业颁发,证明持有人具备一定的计算机视觉技能和知识。 人工智能职业技能等级认证证书:由中国人工智能学会认证,针对不同应用方向,如计算机视觉方向的《计算机视觉测试工程师》、《计算机视觉实施工程师》以及《计算机视觉应用开发工程师》,自然语言方向的《自然语言处理测试工程师》和《自然语言处理实施工程师》以及《自然语言处理应用开发工程师》等。 人工智能职业能力等级评价证书:由国家工信部认证,针对人工智能领域的技术能力进行评估和认证。
 少年书院
少年书院机器视觉就业前景总体来说比较乐观,因为机器视觉是一个快速发展的领域,随着人工智能和自动化技术的不断进步,其应用范围正在不断扩大。然而,要想在这个行业有更好的发展,需要不断学习和提升自己的技能,以适应行业的变化和需求。同时,也需要关注行业的变化和市场需求,并明确自己的职业方向。在选择培训机构和学习课程时,需要根据自己的兴趣和职业规划进行评估和选择。
 kysmile
kysmile[5/5] 机构对比框
添加对比机构